Електронний посібник
ГЕОДЕЗІЯ
частина ІІ




12. СУЧАСНІ ЕЛЕКТРОННІ ГЕОДЕЗИЧНІ ПРИЛАДИ
12.4. Глобальні супутникові системи
12.4.1. Загальні відомості про супутникові навігаційні системи
12.4.2. Будова приймача супутникової системи GPS
12.4.3. Способи визначення місцезнаходження
12.4.4. Режими роботи супутникової апаратури
12.4.5. Проєктування та організація робіт під час створення або згущення геодезичних мереж з допомогою приймачів GPS
12.4.1. Загальні відомості про супутникові навігаційні системи
На сучасному етапі експлуатується дві системи другого покоління супутникових радіонавігаційних систем:
GPS – (Global Position System) – глобальна система визначення місцеположення, яка розробляється і підтримується США;
ГЛОНАСС – глобальна навігаційна система супутників, розроблення і перші етапи створення якої зроблені в СРСР, і яка тепер підтримується Росією.
Саме ці дві системи вже знайшли застосування в геодезії. Крім цього, Європейське співтовариство створює свою навігаційну систему GALILEO.
У сучасній радіонавігаційній супутниковій системі функціонують три основні підсистеми, або сегменти:
– космічний сегмент, або підсистема космічних апаратів, що складається із штучних супутників Землі;
– сегмент управління, або підсистема контролю та управління;
Цей сегмент складається з:
• головного центра керування МСS (Маster Соntrol Station), і знаходиться в місті Соlorado Springs;
• основної станції керування GPS (Ground Соntrol Station), що розташована на Гавайських островах;
• трьох стаціонарних станцій контролю (Моnitor Station). Вони знаходяться на островах Вознесіння (Ascension) в північній частині Атлантичного океану, Дієго-Гарсія в Індійському океані та Кваджалейн в північній частині Тихого океану;
• рухомих контрольних станцій;
– сегмент користувачів, або апаратура користувачів, що включає велику кількість різноманітних приймачів і забезпечує потреби наземних, повітряних, авіаційних та космічних користувачів (приймачі одно- та двочастотні).
В основі систем GPS та ГЛОНАСС лежить концепція незалежної навігації, відповідно до якої обчислення просторово-часових координат виконується в апаратурі користувачів. У рамках цієї концепції обрано позиційний спосіб визначення місцезнаходження користувачів на основі беззапитних (пасивних) віддалемірних вимірювань за сигналами навігаційних штучних супутників Землі з відомими координатами. Вибір концепції незалежної навігації та використання беззапитних вимірювань забезпечили можливість досягнення необмеженої пропускної спроможності супутникових навігаційних систем.
Навігаційний принцип базується на вимірюванні «псевдовіддалей» Di між користувачем та чотирма супутниками. Виходячи з відомих координат супутників, можна обчислити координати антени приймача. Взагалі достатньо трьох вимірювань віддалей. Але четверте вимірювання необхідне для того, щоб визначити різницю у часі між годинниками супутників та годинником приймача. Ця похибка синхронізації визначається також за псевдовіддалями.
Таким чином, навігаційна система буде працювати ефективно, коли структура побудови космічного сегмента забезпечує прийом сигналів не менш як від 4-х супутників у будь-який момент часу в будь-якій точці земної кулі.
Супутники ГЛОНАСС розташовані у трьох орбітальних площинах, причому на кожній орбіті обертається 8 супутників. У системі GPS прийнято 6 орбітальних площин по 4 супутники в кожній.

Рис. 12.9. Супутникові радіонавігаційні системи
Супутники обох систем випромінюють сигнали на двох частотах, які вміщують інформацію про координати відповідних супутників. Ця інформація приймається та фіксується спеціальними вимірювальними станціями – приймачами.
12.4.2. Будова приймача супутникової системи GPS
Геодезичний приймач супутникової системи включає антену (сенсор), блок управління (контролер), акумуляторні батареї, штатив та з’єднувальні кабелі.
Сенсор – це водонепроникний приймач радіовипромінення масою до 2 кг. Він може одночасно відслідковувати сигнали 6–12 супутників на одній або двох частотах.
Керування роботою приймача здійснюється за допомогою контролера або ПЕОМ. Контролер побудовано на базі мікропроцесора. Він забезпечує взаємозв’язок між оператором (спостерігачем) і сенсором. Три основні функції контролера полягають в керуванні роботою сенсора, виборі режиму спостережень та реєстрації інформації з супутника.
Процесор забезпечує попередню обробку вимірювальної інформації, її реєстрацію, функціонування каналів зв’язку, клавіатури та дисплея контролера. Клавіатура більшості приймачів схожа на клавіатуру ПЕОМ.

Рис. 12.10. Загальний вигляд геодезичного приймача
Результати вимірювань, тобто сигнали з супутників, реєструються на жорстку карту (модуль пам’яті) ємністю від 512 Кб до 4 Мб, яка має внутрішнє джерело живлення для забезпечення збереження даних. Дані з модуля пам’яті потім переписуються в ПЕОМ через контролер або спеціальний пристрій. Подальша обробка інформації (обчислення координат) виконується на ПЕОМ за спеціальними програмами, які постачаються разом з приймачами.
12.4.3. Способи визначення місцезнаходження
Існує два способи визначення місцезнаходження за допомогою супутникових систем: абсолютний і відносний (диференційний).
Під час визначення абсолютного положення координати антени приймача отримують в єдиній системі координат, що прийнята в навігаційній системі. У цьому випадку використовують тільки один приймач, який встановлюють на пункті, і впродовж достатнього проміжку часу ведуть відповідні спостереження.
Точність визначення абсолютних координат переважно визначається похибками, які залежать від роботи пристроїв, що передають сигнали з супутників, стану зовнішнього середовища у зоні розповсюдження радіохвиль, способів обробки сигналу приймачем. Немалий вплив мають похибки координат супутників, а також взаємне розташування супутників і антени приймача в момент проведення спостережень. Тому найвища точність абсолютного визначення, яка досягається за нерухомого приймача навіть під час багатоденних безперервних спостережень, становить 3–5 м. Це, зрозуміло, недостатньо для геодезичних цілей. З цієї причини у геодезичній практиці використовуються виключно відносні (диференційні) способи.
За відносних визначень спостереження виконують із застосуванням двох приймачів на двох об’єктах у збіжні моменти часу по одному й тому самому сузір’ю супутників. За результатами цих вимірів визначають проєкції на осі геометричної системи координат базової лінії S, яка з’єднує ці два об’єкти, відстань між ними, а також кути, що характеризують напрямок базової лінії.
12.4.4. Режими роботи супутникової апаратури
Супутникова приймальна апаратура призначена для роботи в режимах «статика», «швидка статика», «стоп-іди», «кінематика» і «реокупація».
Під час геодезичних робіт переважно використовують статичні вимірювання. Кінематичні знімання в режимах «кінематика» і «реокупація» використовують для визначення координат (траєкторії) пересувного приймача відносно іншого нерухомого сенсора.
")
Рис. 12.11. Робота супутникової апаратури в режимі «статика»
Статичні зйомки передбачають виконання диференціальних супутникових спостережень між двома й більше нерухомими приймачами, один з яких є базовим. За базову станцію приймається будь-який пункт, координати якого відомі, або пункт із найбільшою тривалістю вимірів. Усі станції, місцезнаходження яких визначено відносно координат базової станції, називаються пересувними. Будь-яка з пересувних станцій, координати якої отримані з необхідною точністю, може бути використана як базова для подальшого створення мережі.
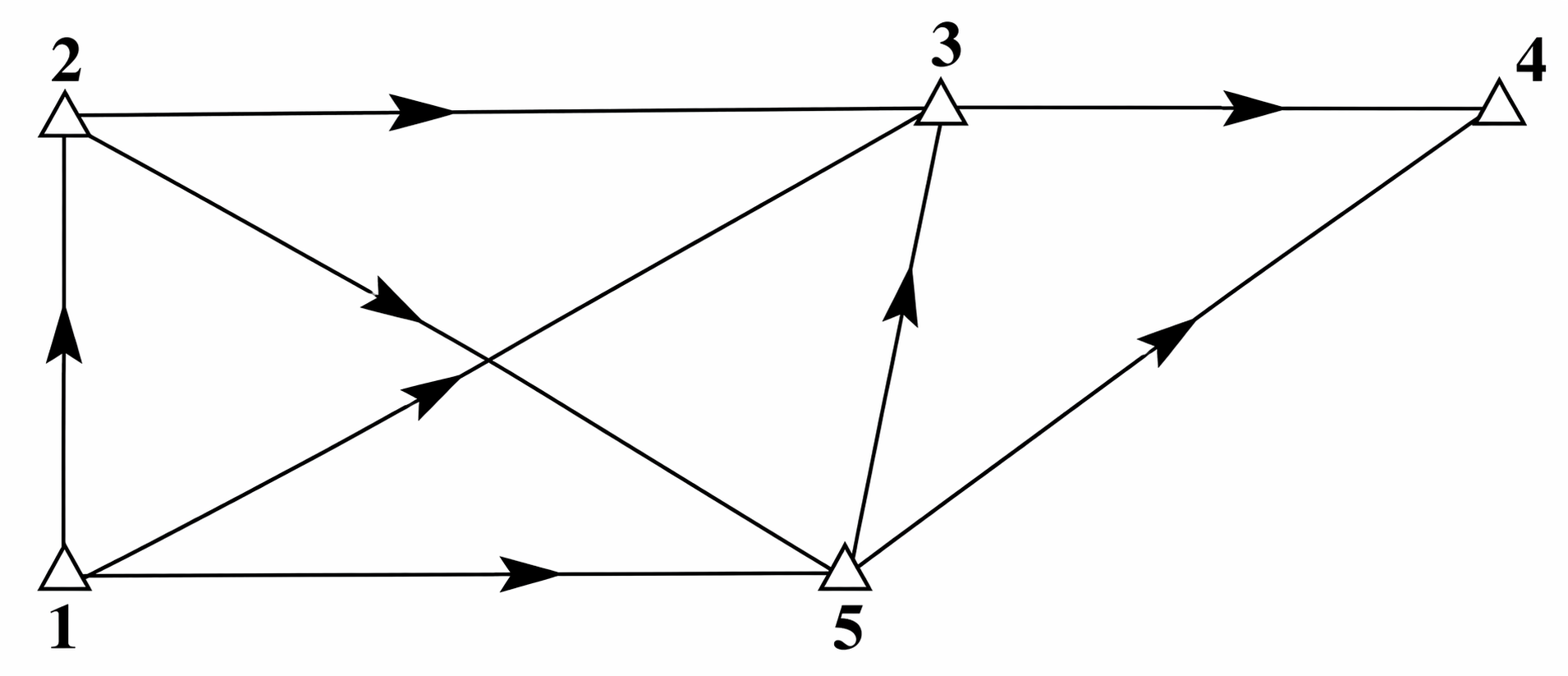
Рис. 12.12. Робота супутникової апаратури в режимі «швидка статика»
Наприклад: для мережі спочатку базовою станцією є пункт 1, відносно нього визначається положення пунктів 2,3,5, далі відносно п.2 визначають п.3 і 5, п.3 – п.4 і 5. Таким чином, постійна базова станція для всієї мережі в цілому не обов’язкова.
Статичні зйомки виконують за великих відстаней (сторони понад 10 км) за умови спостереження чотирьох і більше супутників. Для забезпечення паспортної точності необхідна, як мінімум, одна година спостережень.
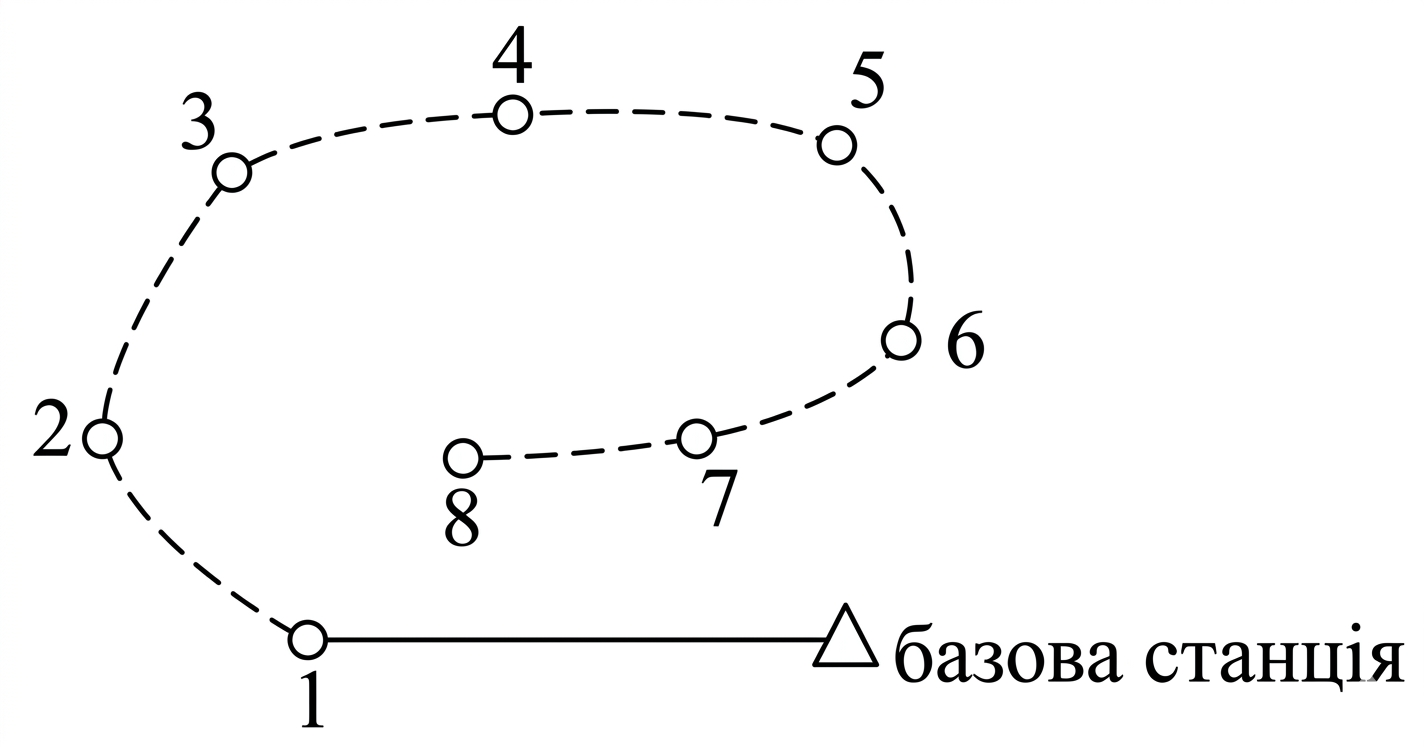
Рис. 12.13. Робота супутникової апаратури в режимі «стоп-іди»
Швидкі статичні зйомки збільшують продуктивність вимірів. На коротких лініях (до 2–5 км) за умови спостереження щонайменше чотирьох–п’яти супутників із сприятливою геометрією сузір’я досягнення паспортної точності забезпечується за тривалості спостережень 5–10 хв.
Знімання в режимі «стоп-іди» (stop-and-go) дає змогу визначати значну кількість пунктів, однак вимагає безперервного супроводу супутників приймачем протягом усього часу вимірювань, зокрема під час послідовного переміщення між пунктами 1, 2 … 8.
На першому пункті – пункті ініціювання – необхідно знаходитися не менше 10 хв; час вимірів на інших пунктах, що визначається, складає від 5 до 30 сек. Означений режим відповідає зніманню об’єктів з відстанями між пунктами не більше 300 м і за відсутності перешкод для проходження радіосигналів від супутників.
12.4.5. Проєктування та організація робіт під час створення або згущення геодезичних мереж з допомогою приймачів GPS
Згущення геодезичних мереж вищих класів виконують статичним методом. Час сесій залежить від класу створюваної мережі та точності приймача. Під час створення мереж нульового порядку спостереження тривають 3…5 діб. А під час створення або згущення мереж 1 та 2 класів спостереження виконують протягом від 45 хвилин до декількох годин.
На першій стадії проєктування потрібно встановити, де знаходиться об’єкт робіт, його межі та де повинні знаходитись пункти визначення або потрібну їх густоту. Для отримання положення пунктів з високою точністю віддалі між сусідніми пунктами мережі не повинні перевищувати 15…20 км. Оптимальною є віддаль між пунктами 5…15 км. За збільшення віддалі зростають абсолютні помилки місцезнаходження пунктів. Тому, коли віддаль між пунктами є більшою, рекомендують визначити додаткові точки, які можуть бути незакріпленими.
Наступним кроком є отримання інформації про наявність на об’єкті геодезичних пунктів (планових і висотних) попередньо створених мереж та обстеження їх стану, що дозволяє встановити, які вихідні пункти можуть бути використані на цьому об’єкті.
Кількість потрібних вихідних планових і висотних пунктів на об’єкті залежить від його площі та конфігурації, тобто, чи територія об’єкта займає деяку компактну площу, чи об’єкт є витягнутим або має траверсний характер.
У загальному випадку в будь-якій створюваній плановій мережі повинно бути не менше 3 планових або планово-висотних вихідних пунктів. Але для отримання потрібної жорсткості мережі віддаль між вихідними пунктами не повинна перевищувати 60 км. Отже, три вихідні пункти необхідні для створення мережі розміром не більшим, як 60 на 60 км. Коли розміри мережі є більшими, то відповідно потрібно збільшувати кількість вихідних пунктів.
Три вихідні планові пункти є необхідними і не дають можливості перевірити правильність їх координат. Коли вихідних пунктів в мережі є більше, ніж три, то можна виявити помилкові вихідні пункти.
Коли мережа має компактну конфігурацію, то найкраще, щоб вихідні пункти знаходились на краях мережі. В ідеальному випадку пункти створюваної мережі повинні знаходитись всередині багатокутника, вершинами якого є вихідні пункти. Рекомендують нанести на карту пункти, які потрібно визначити, а тоді поділити площу з пунктами визначення на квадрати зі сторонами біля 30 км. На кожні чотири квадрати не менше як три повинні мати по одному вихідному плановому пункту. Вихідні пункти можуть знаходитись за територією об’єкта, але віддаль від нього до найближчих пунктів визначення не повинна перевищувати 20…40 км.
У вузькій витягнутій мережі, довжина якої не перевищує 60 км, теж має бути не менше трьох пунктів. Два з них повинні бути на краях мережі, а третій – приблизно посередині.
За використання GPS/GNSS-приймачів взаємна видимість пунктів для їх визначення не є обов’язковою. Пункти, на яких будуть проводитись спостереження, повинні знаходитись в місцях, де немає перешкод для приймання сигналів супутників. «Поле зору» антени приймача повинно охоплювати весь небосхил за винятком нижньої його частини, напрямки на межу якої утворюють з горизонтальною площиною вертикальні кути не більші від.
У зв’язку з цим мають місце такі вимоги:
– у безпосередній близькості не повинно бути ніяких споруд, які обмежують «поле зору» антени приймача;
– сигнали супутника не повинні проходити на антену через крони дерев, особливо за наявності листяного покриву.
Для виключення приймання антеною відбитих від сторонніх об’єктів коливань супутника вимагається також, щоб поблизу встановленої антени на висоті, більшій від висоти екрана, не було металевих та інших об’єктів.
Крім цього, слід пам’ятати, що пункти, на яких працюватимуть приймачі, не можуть знаходитись ближче, ніж 500 м від потужних наземних джерел радіохвиль, таких як телевізійні антени, радіолокатори та ін.
Велике значення під час створення мереж з допомогою приймачів глобальної супутникової системи має рекогностування, за якого перевіряють можливість дотримання перерахованих вище вимог, уточнюють можливості зв’язку з супутниками на пунктах, ведуть пошук і обстеження вихідних пунктів.
Крім того, рекогностування повинно давати точну інформацію про мережу автодоріг на об’єкті, час переїздів між пунктами, про під’їзди до пунктів. Цю інформацію використовують під час розробки детального плану на кожний робочий день.
Коли місця розміщення пунктів остаточно встановлені, приступають до їх закріплення.
Під час створення геодезичних мереж потрібно проєктувати орієнтирні пункти. Вони мають бути віддаленими від пункту мережі не менше, як на 100 м, тоді їх положення буде визначене з точністю не меншою, як 1:20000. Ці пункти включаються в спостереження, як і всі інші.
Для нормальної організації проведення спостережень, особливо під час створення мереж першого та нижчих класів, оператори кожної станції повинні мати в своєму розпорядженні автомашину. Інакше переходи з пункту на пункт будуть займати набагато більше часу, ніж самі спостереження і продуктивність праці буде низькою. Для забезпечення одночасності вмикання та вимикання приймачів на всіх пунктах між операторами приймачів повинен бути налагоджений радіотелефонний зв’язок. За великих об’ємів вимірювань, коли за один день в приймачі нагромаджується багато інформації, її потрібно переписувати в комп’ютер. Для цього бригада повинна забезпечуватись польовим комп’ютером (note book).
Для забезпечення високоточних вимірювань біля приймачів рекомендують проводити метеорологічні спостереження. Для цього біля кожного приймача встановлюють психрометр та барометр.
До кожного приймача потрібно мати штатив, лотапарат для точного центрування антени над геодезичним пунктом і лінійку для визначення висоти антени. Останню можна придбати разом з приймачем.
Під час виконання високоточних робіт можна попередньо вивчити якість геометричного розміщення супутників та їх кількість на час проєктованих спостережень, тобто вивчити дані про прогноз значень PDOP та інших показників. Цю інформацію отримують з допомогою відповідної програми, увівши в комп’ютер визначені на карті або іншим шляхом наближені координати пунктів, на яких планується виконувати спостереження, та день і час спостережень.
Далі проєктують маршрут переміщення кожного приймача, послідовність пунктів, на яких він буде встановлений, та кількість сесій на кожному пункті. Крім цього, визначають початок кожної сесії, тобто задають час ввімкнення та вимкнення приймачів на пунктах.
Для проведення спостережень антени встановлюють на пунктах, нівелюють їх і центрують. В пам’ять приймачів вводять параметри сесії, а саме – мінімальну висоту супутників над горизонтом та інтервал часу між прийманням сигналів супутників. В домовлений час одночасно вмикають всі приймачі. Тривалість одночасної роботи приймачів на пунктах, тобто тривалість сесії, встановлюється проєктом. Після закінчення сесії приймачі вимикають. Ті, які потрібно, перевозять на наступні пункти.
Одночасна робота двох приймачів дає можливість визначити вектор, що з’єднує пункти, на який встановлені антени приймачів. Якщо одним кінцем вектора є вихідний пункт, то координати другого кінця вектора можна визначити за результатами спостережень і він стане вихідним для наступних спостережень. Далі приймач, який був на вихідному пункті, перенесемо на наступний пункт визначення і проводимо спостереження. Вони дадуть можливість визначити координати і цього пункту. Якщо на цьому спостереження закінчити, то отримані значення координат пунктів не контролюються. Тому потрібно проводити надлишкові спостереження, наприклад, замкнути трикутник. Надлишкові вектори дадуть можливість проконтролювати отримані результати і провести врівноваження. Вимірюючи поодинокі вектори між пунктами визначення, потрібно створювати замкнені полігони, в яких має бути не більше, як по 8 сторін. Тоді в кожному полігоні можна визначити нев’язку, яка буде характеризувати точність виміряних векторів.
Коли маємо три приймачі, то виконуючи ними одночасні спостереження, отримуємо два незалежні вектори, хоч може здаватись, що визначаються три, бо вектори між антенами приймачів створюють трикутник. Але третій вектор є залежним, бо отримані з попереднього опрацювання вектори «замикаються», тобто нев’язки в цьому полігоні із трьох векторів є рівними нулю.
За одночасної роботи чотирьох приймачів отримуємо тільки три незалежні вектори, хоч можна було б думати, що визначається їх шість.
Ці незалежні вектори повинні створювати полігони, про які йшла мова вище. Нагадаємо, що кількість незалежних векторів, які створюють полігон, не повинна перевищувати 8. При цьому проєкт спостережень бажано складати так, щоб появилися перерізи незалежних векторів. Це підвищує надійність мережі. Крім цього бажано отримувати вектори з двох і більше незалежних сесій.
Під час складання проєкту потрібно слідкувати за тим, щоб вихідні точки мали зв’язок, як правило, з трьома пунктами визначення. Зв’язок тільки з двома пунктами має з’являтись як виняток. Надійний зв’язок мережі з вихідними пунктами повинен встановлюватись щонайменше з двох сесій.
Презентація

Питання для самоперевірки
1. Загальні відомості про глобальні супутникові системи ГЛОНАСС та NAVSTAR.
2. З чого складається космічний сегмент системи GPS?
3. Визначення положення точок методом GPS-спостережень.
4. З чого складається сегмент керування системи GPS?
5. Методи спостережень GPS.
6. Способи та методи визначення координат.
7. Склад приймальної супутникової апаратури.
8. Технологія виконання GPS-спостережень, підготовка та виконання робіт.
9. Обмеження в застосуванні GPS-систем на місцевості.
10. Проєктування та організація GPS-робіт.