11.1.1. Передача координат з вершини знака на землю
Пункти опорної сітки інколи бувають розташовані наверху споруд. Для прив’язки точки В хода АВС знімальної основи до опорної точки М, розташованої наверху споруди, проводиться вимірювання кутів і ліній.
Біля опорної точки М намічають точку В у такому місці, щоб було видно пункт М та опорну точку N. При точці В вимірюють два базиси ВD = b1 та ВЕ = b2. Для отримання координат точки В треба знати довжину лінії МВ = d та кут NMB = γ. При точках D, В, Е вимірюють горизонтальні кути β1, β2, β3, β4, β5, β6.
Рис. 11.1. Передача координат з вершини знака т. М на т. В на місцевості
З трикутників ВDМ та ВЕМ за виміряними кутами та базисами можна обчислити за теоремою синусів два значення довжини лінії ВМ = d.
З цих результатів беруть середнє значення. Кут γ вираховується з трикутника ВМN, в якому довжина лінії МN = s. Дирекційний кут αMN вираховуємо за оберненою геодезичною задачею. За теоремою синусів кут μ при точці N вираховується за формулою:
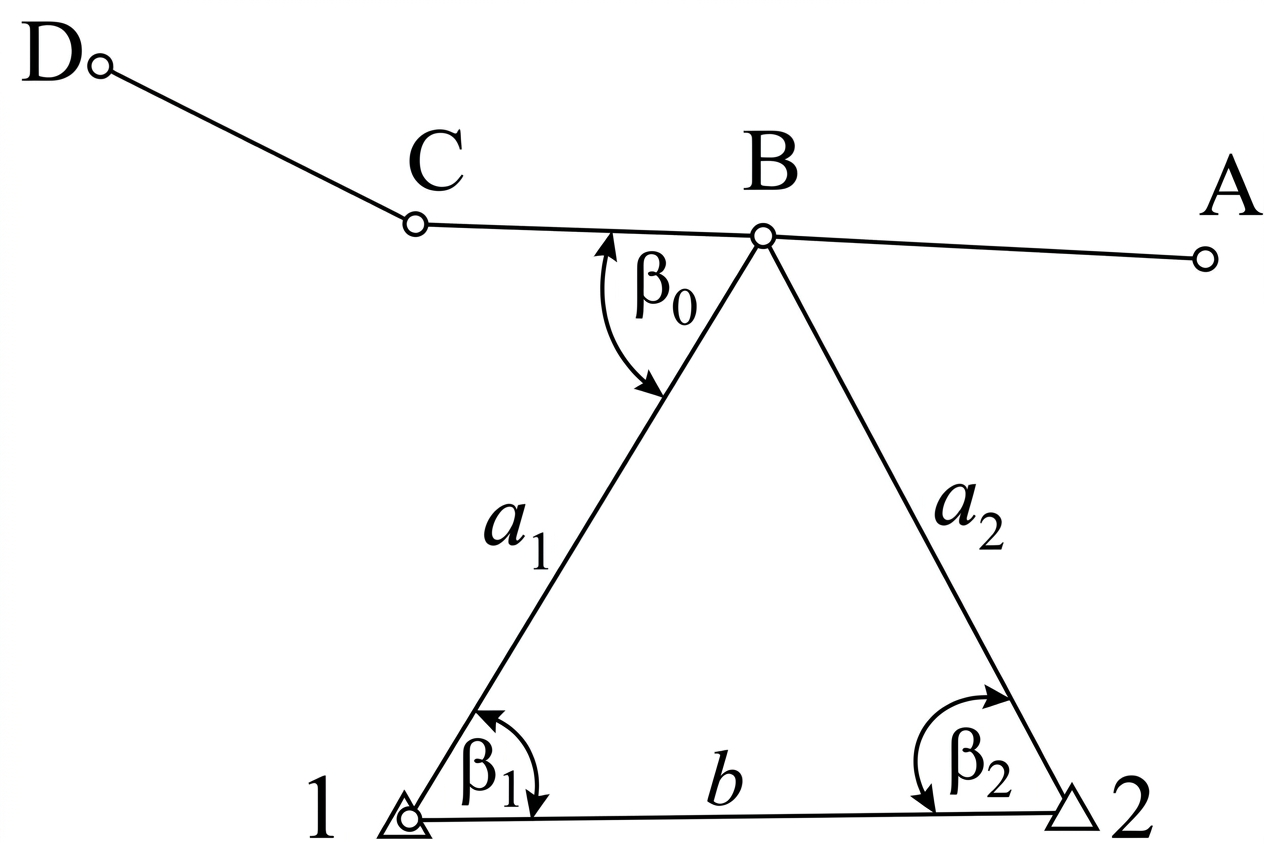
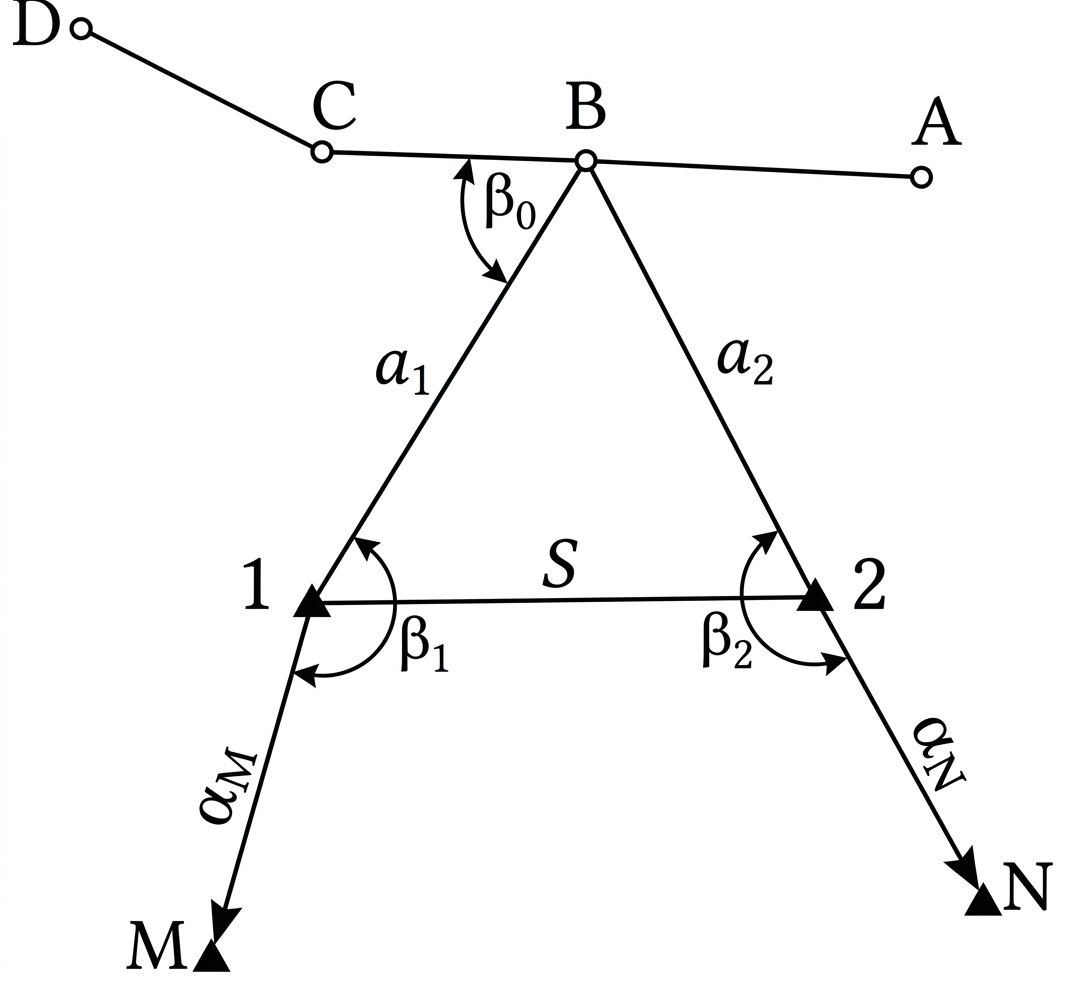
Прив’язка точки ходу методом прямої засічки – якщо потрібно прив’язати хід АВСD до точок опори 1 і 2, координати яких х1, у1 та х2, у2 відомі. Задача вирішиться, якщо знайдемо координати точки В та αВС.
Рис. 11.2. Прив’язка точки В ходу методом прямої засічки
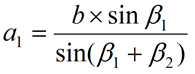
Якщо між точками1 і 2є видимість, то вимірюємо кути β1 і β2. Координати точки В визначають з трикутника 1В2 за теоремою синусів, за стороною b та кутами β1 і β2 визначаємо лінії а2 та а1.
Розходження в координатах можуть бути за рахунок округлення при розрахунках:
Передача дирекційного кута на сторону ВС визначаємо через кут β0
Для отримання надійності результату визначаємо дирекційний кут лінії ВА.
Прив’язку методом прямої засічки можна зробити і в тому випадку коли між точками 1 і 2нема видимості. В цьому випадку вимірюють кути β1, β2 та β0, за якими вираховують дирекційні кути ліній 1В, 2В і ВС, використовуючи формули:
Рис. 11.3. Прив’язка точки В хода методом прямої засічки за відсутності видимості між точками 1 і 2
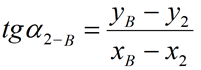
Координати точки В можна отримати таким чином. Виразимо дирекційні кути ліній 1В і 2В через координати точок тобто:
звідки маємо:
далі отримаємо:
звідки
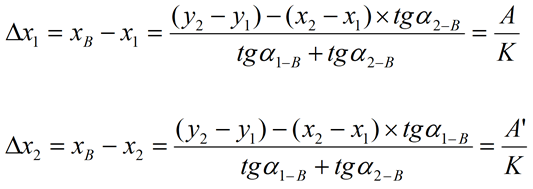
З обох частин рівняння вирахуємо х1 та х2. Отримаємо прирости: х1
Прирости координат Δ у1 та Δ у2 отримуємо з формул. Координати шуканої точки В будуть:
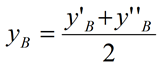
Рис. 11.4. Прив’язка точки 4 ходу методом зворотної засічки
Прив’язка точки методом зворотної засічки (задача Потенота) – полягає в тому, що за координатами 3-х опорних точок 1, 2, 3 визначають координати точки 4 для прив’язки хода А4В до опорних сіток. Для вирішення цієї задачі при точці 4 вимірюють горизонтальні кути β і γ, а для вирахування дирекційного кута лінії 4В вимірюють кут δ.
Для розрахунку координат х4, у4 за координатами опорних точок х1, у1, х2, у2, х3, у3 використовують формули: 1) дирекційний кутα1-4 лінії 1-4 вираховують за формулою:
2) дирекційні кути інших ліній вираховують за формулами:
3) прирости абсцис між точками 1 і 4 та 2 і 4 визначаємо за формулами:
4) координати точки 4:
5) дирекційний кут лінії 4В хода А4В вираховують за формулою:
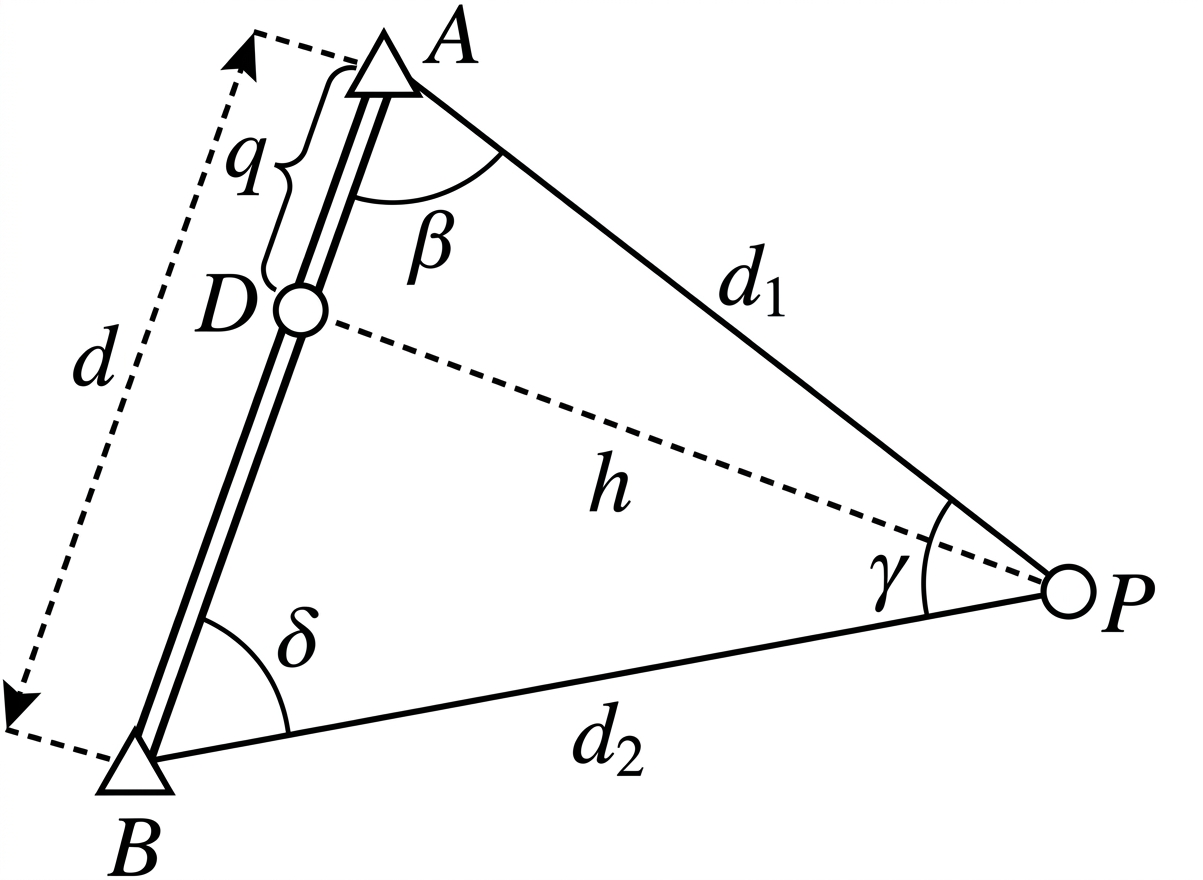
Лінійна геодезична засічка Визначення координат точки Р за координатами двох вихідних (відомих) пунктів А і В та двома виміряними віддалями d1 та d2 від шуканої точки до вихідних пунктів називають лінійною геодезичною засічкою.
Рис. 11.5. Прив’язка точки Р методом лінійної засічки
Розв’язавши обернену геодезичну задачу, за координатами точок А(ХА,УА) та B(XB,YB), визначимо довжину сторони АВ=d, та її дирекційний кут αА–В. Тоді в трикутнику АВР будуть відомі усі три сторони.
Трикутник розв’язується за формулами тригонометричних функцій косинусів (або тангенсів) половинних кутів обчислимо кути трикутника:
де
– півпериметр трикутника АВР.
Знаючи всі шість елементів трикутника АВР, за формулами прямої та оберненої засічок можна обчислити координати точки Р два рази: за координатами точки А та координатами точки В. Контролюють обчислення за співпадінням координат. Проте, якщо зроблено похибку під час польового вимірювання лінії d1 або d2, то ця похибка не виявиться. Тому, для контролю польових вимірювань, потрібно мати не дві, а три вихідних точки та виміряти ще одну, третю лінію. Розв’язок може бути виконаний і без обчислення кутів трикутника АВР. Покажемо це, знайдемо основу перпендикуляра точки Р на лінії АВ, залежно від того, тупий чи гострий кут β, отримаємо основу перпендикуляра (точку D) на продовженні лінії ВА або на лінії АВ.
Відрізок q– проєкція d1на d;
Кут β поки що невідомий.
Якщо кут β гострий, матимемо:
Якщо кут β тупий, то:
В нашому випадку β гострий кут. Тому маємо:
З прямокутного трикутника АРD можемо записати:
Оскільки
то
Дирекційний кут
буде дорівнювати:
Знак кута β вибирається залежно від того, ліворуч чи праворуч розташована точка Р відносно лінії АВ.
Праворуч
ліворуч
В нашому випадку – ліворуч.
Прирости координат точки Р відносно пункту А, координати якого відомі, обчислимо за формулами: